Свежие скидки, купоны, новинки в наших каналах:
Полётные контроллеры
Группа ВКонтакте
Matek H743-SLIM
Коптеры → Гоночные FPV-дроны → Полётные контроллеры → ПК H7 → Matek H743-SLIM
| MCU: | H743 |
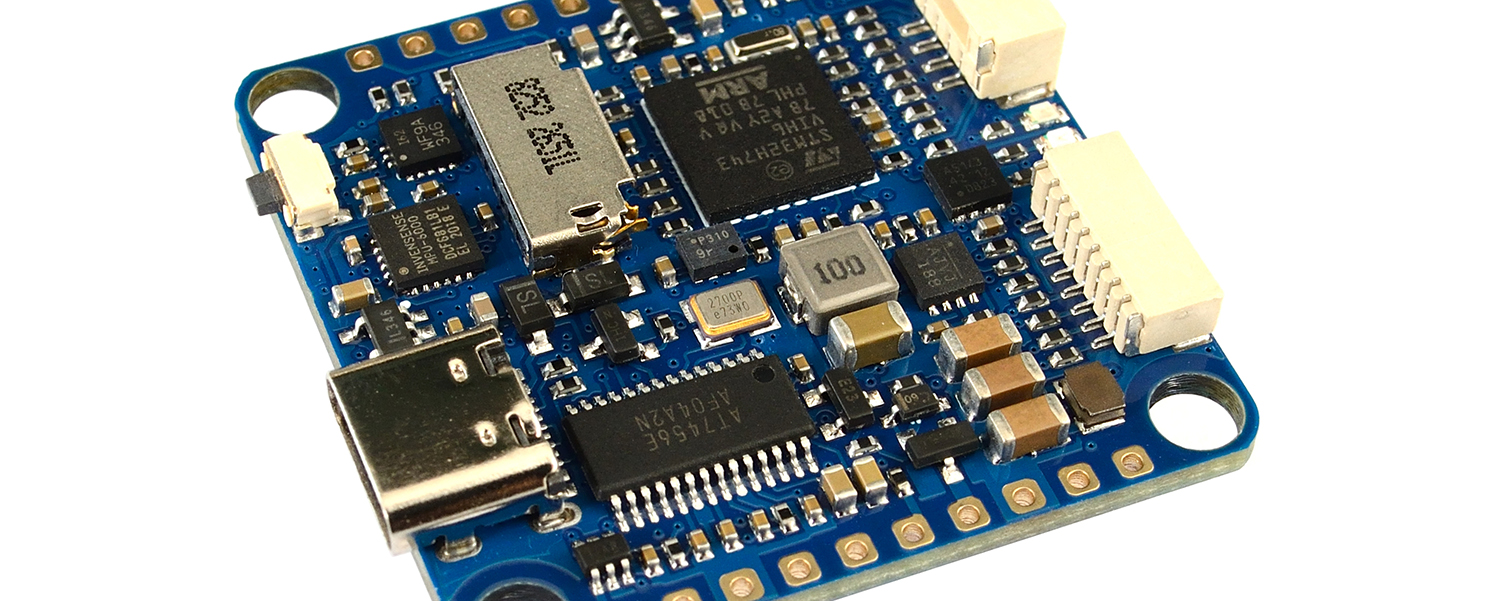
| Датчик: | ICM20602 & MPU6000 |
| Барометр: | DPS310 |
| OSD: | + |
| CAM in: | 2 |
| Питание: | 2-8S |
| 3.3V BEC: | 0.2A |
| 5V BEC: | 2A |
| Датчик тока: | - |
| PWM: | 13 |
| Тип ESC: | - |
| ESC: | - |
| BLHeli: | - |
| Приёмник: | - |
| RSSI: | + |
| VTX: | - |
| UART Rx: | 7 |
| UART Tx: | 7 |
| I2C: | 2 |
| CAN: | 1 |
| Buzzer pad: | + |
| LED pad: | + |
| Vbat: | 2 |
| CURR pad: | 2 |
| Air speed: | + |
| IR/INR pad: | + |
| Blackbox: | MicroSD |
| USB: | Type-C |
| USB pads: | + |
| Поддержка DJI: | + |
| Bluetooth: | - |
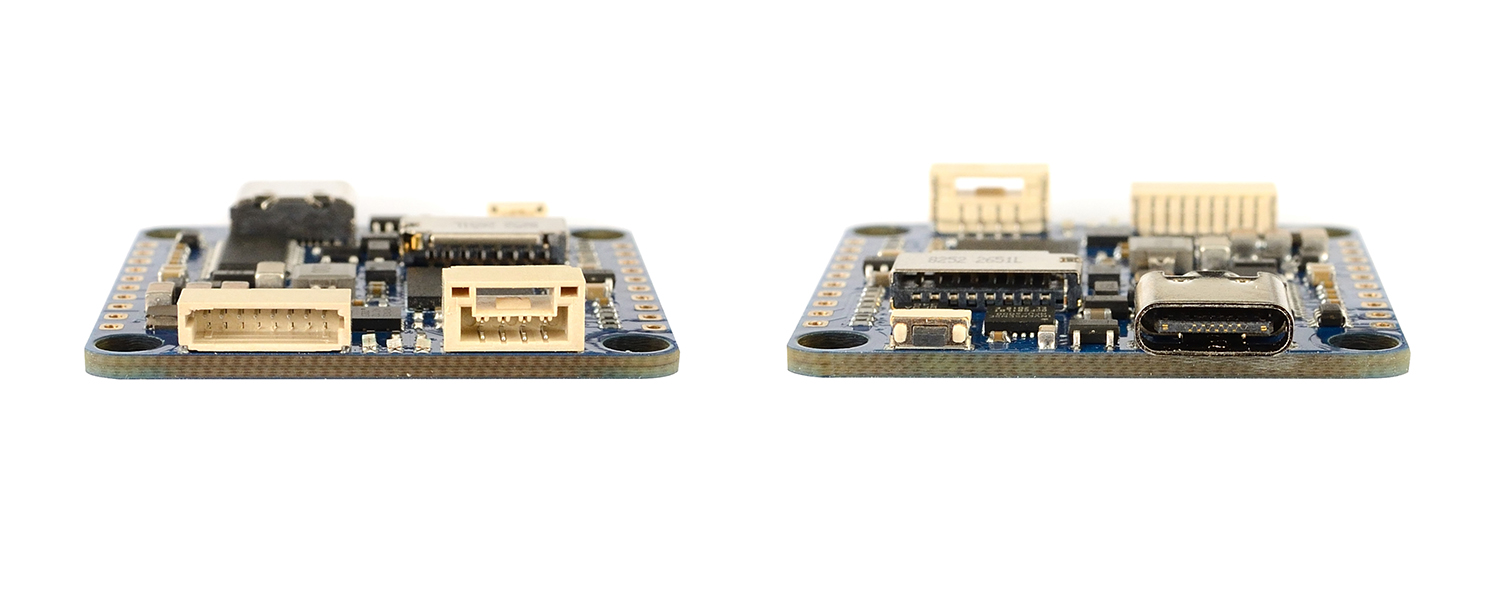
| Габариты: | 36x36x5мм |
| Крепление: | 30.5x30.5мм |
| Масса: | 7 г |
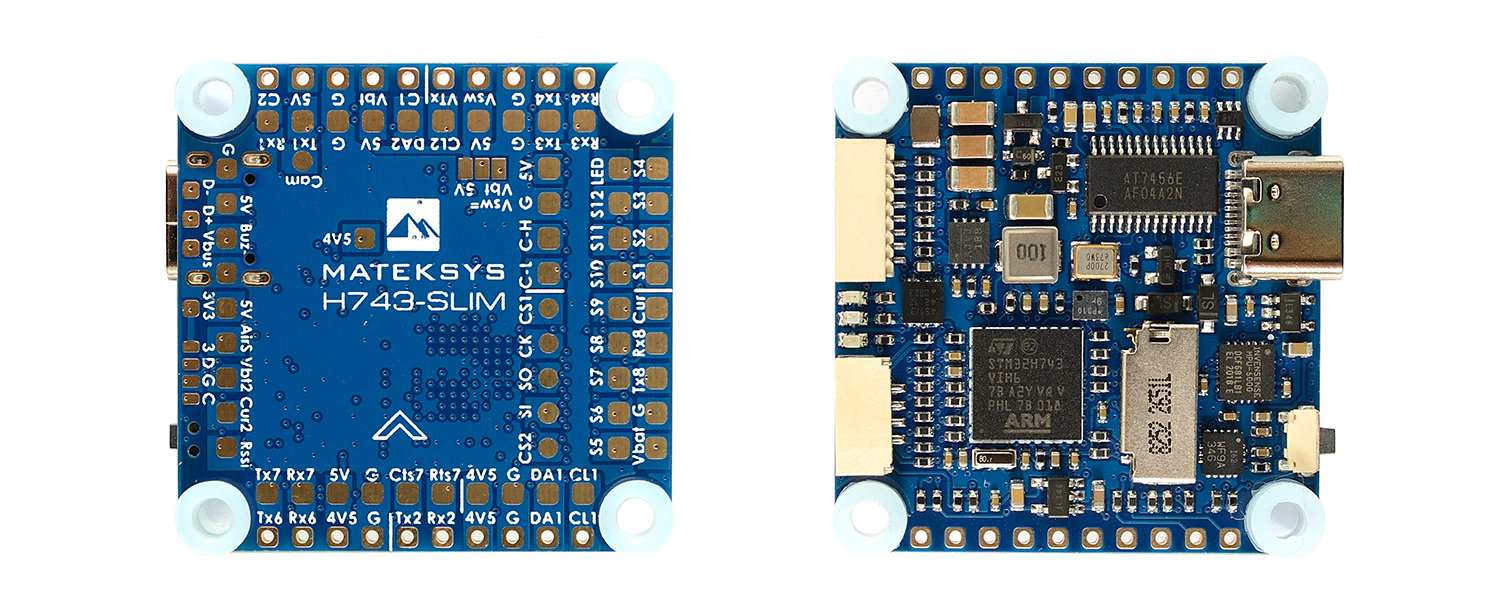
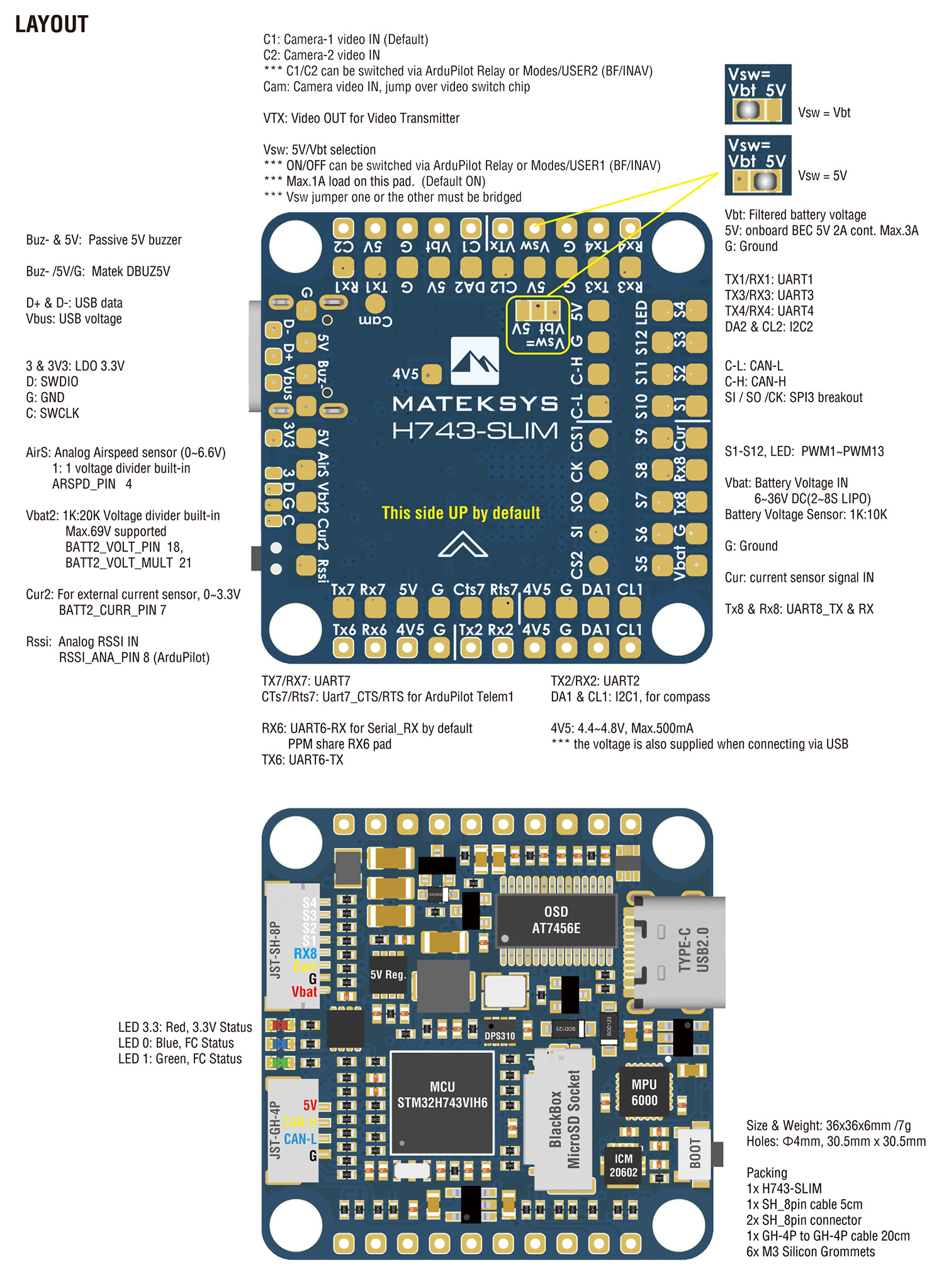
Flight Controller H743-SLIM
STM32H743VI, ICM20602 & MPU6000, DPS310, OSD, 7x UARTs, 2x I2C, 1xCAN, 13x PWM outputs, BEC5V,

Gallery
Specifications
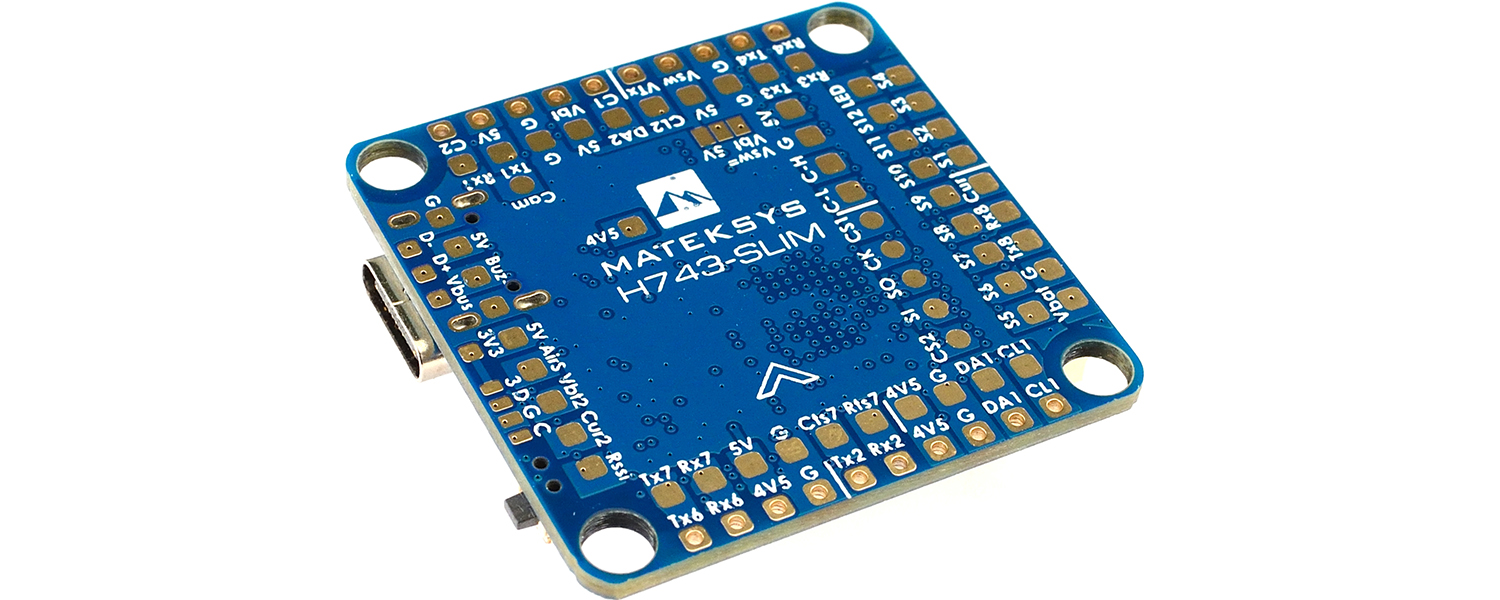
Layout
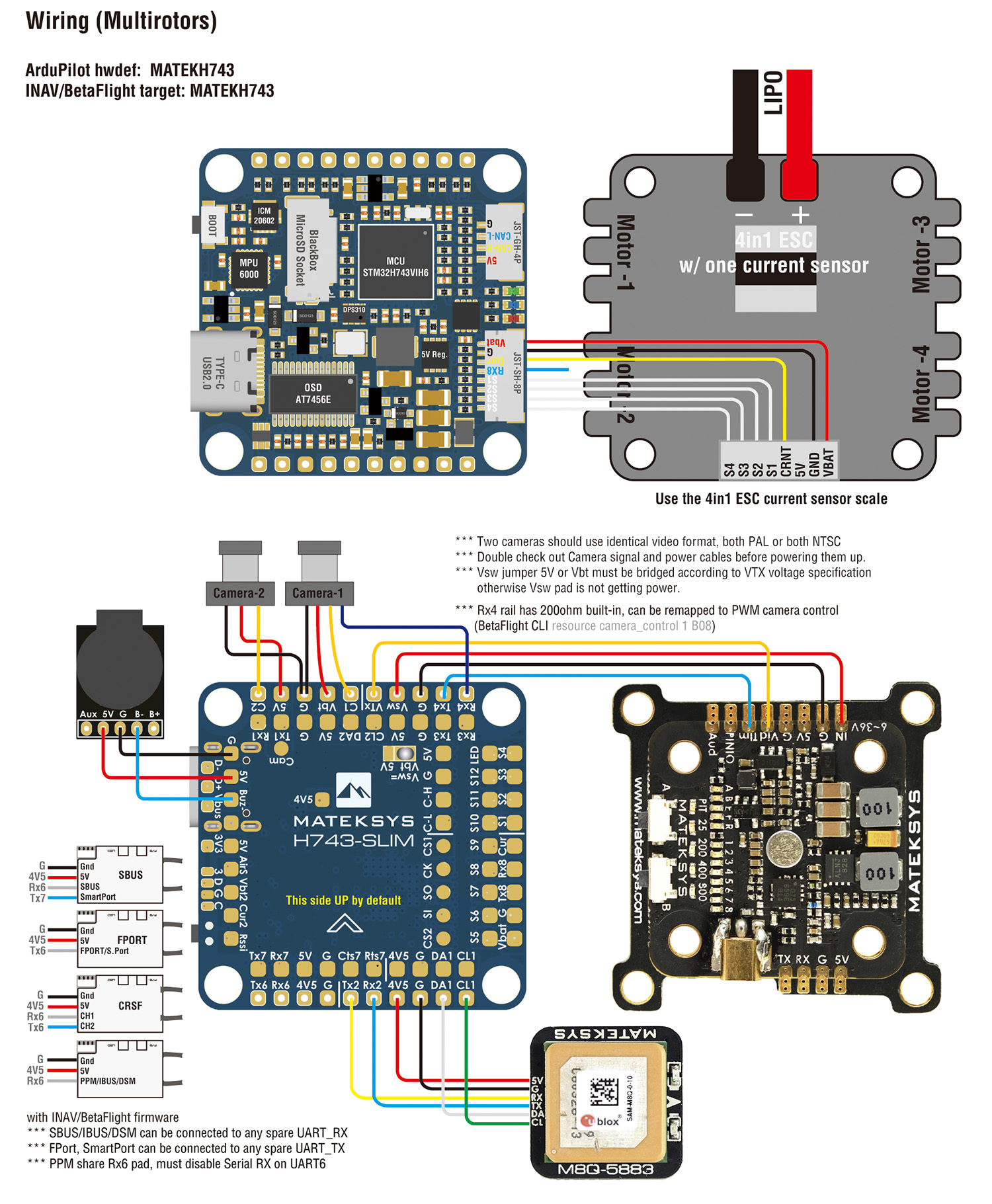
Wiring
ArduPilot mapping
ArduPilot Relay
reserved
Tips
Resellers
Поделиться
Цены на Matek H743-SLIM в магазинах
Найдено предложений: 33 (Banggood1)
| Магазин | Остаток на складе | Цена лота | Цена доставки | Купон / промокод | Количество в лоте | Цена за единицу |
| Banggood | Нет на складе | ₽6103 $80 | 1 | ₽6103 $80 |
См. также

Mateksys CANPDB-4A BEC & JST-GH Splitter
₽1318
$17

Matek H743-SLIM - super light support for Dart250g

Свежие скидки, купоны, новинки в наших каналах: