Китайский Новый год
Хоббикинг спешит сообщить, что Великий Китайский Новый год уже на носу!
И просит иметь ввиду, что международный склад в Гонконге (с которого, в частности, отправляются посылки в Россию и страны СНГ) не будут работать с 11-го по 13-е февраля.
А если вы будете заказывать крупную модель (JIT items), то вам полезно знать, что они отправляются со склада в Китае, который не будет работать с 6-го по 16-е февраля.
Служба поддержки клиентов же будет работать в обычном режиме, поэтому при возникновении проблем, обращайтесь в неё в любое время!
И просит иметь ввиду, что международный склад в Гонконге (с которого, в частности, отправляются посылки в Россию и страны СНГ) не будут работать с 11-го по 13-е февраля.
А если вы будете заказывать крупную модель (JIT items), то вам полезно знать, что они отправляются со склада в Китае, который не будет работать с 6-го по 16-е февраля.
Служба поддержки клиентов же будет работать в обычном режиме, поэтому при возникновении проблем, обращайтесь в неё в любое время!
Что такое партнёрские ссылки и как их использовать
При публикации на форумах, блогах, в социальных сетях или на других сайтах партнёрских ссылок RCSearch.ru вы можете получить бонусные средства на ваш счёт в Хоббикинге и Паркфлаере.
Читать дальше →
Читать дальше →
Видео-обзор автожира Durafly Auto-G
В этом видео-обзоре рассматриваются принципы управления моделью удивительного летательного аппарата - автожира.
Автожир Durafly в сборе, готовый к полёту (PNF)
Большое количество запчастей к автожиру Durafly
Автожир Durafly в сборе, готовый к полёту (PNF)
Большое количество запчастей к автожиру Durafly
Видео-обзор импеллерного самолёта Durafly Sea Vixen
Видеообзор: пульт управления Turnigy 9XR
В Хоббикинге появился радиопередатчик Turnigy 9XR. Пару слов от его создателей в видеообзоре:
Turnigy 9XR Mode 2 (без модуля)
Turnigy 9XR Mode 1 (без модуля)
Алюминиевый кейс для Turnigy 9XR
Turnigy 9XR Mode 2 (без модуля)
Turnigy 9XR Mode 1 (без модуля)
Алюминиевый кейс для Turnigy 9XR
Видео-обзор светодиодных подсветок
Продолжаем видео-обзоры на мультикоптерную тему. На очереди светодиодная подсветка в нескольких вариантах. На сайте хоббикинга есть ещё варианты, не рассмотренные в этом видео-обзоре.
Светодиодные кольца
100 мм: красные, зелёные, синие, белые.
145 мм: красные, зелёные, синие, белые.
165 мм: красные, зелёные, синие, белые.
Светодиодные кольца
100 мм: красные, зелёные, синие, белые.
145 мм: красные, зелёные, синие, белые.
165 мм: красные, зелёные, синие, белые.
Видео-обзор новых моторов Multistar
Недавно в Хоббикинге появились новые моторы Turnigy Multistar, а это их небольшой видеообзор.
Turnigy Multistar 4822-390Kv
Turnigy Multistar 4822-490Kv
Turnigy Multistar 4822-570Kv
Turnigy Multistar 4822-690Kv
Turnigy Multistar 4822-390Kv
Turnigy Multistar 4822-490Kv
Turnigy Multistar 4822-570Kv
Turnigy Multistar 4822-690Kv
Первый quadcopter на базе от MK. (часть 5 — устанавливаем электронику)
Доброе!
Сегодня продолжу сборку своего чуда, как бы его назвать? Знаете дают клички машинам...
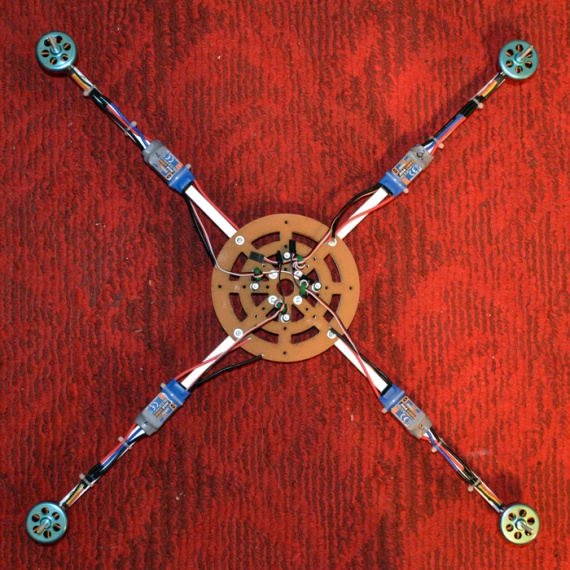
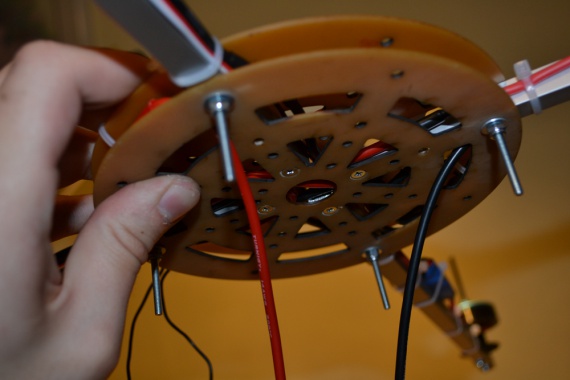
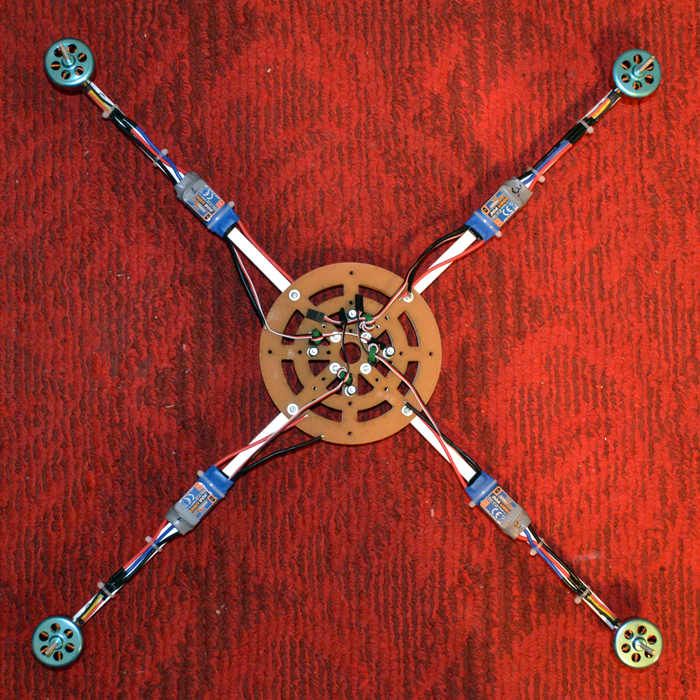
Приступим. Устанавливаем регуляторы, следим, что бы моторы вращались следующим образом — 1 и 2 моторы вращались по часовой, а 3 и 4 против.
1 3
X
4 2
На 1 и 2 надо устанавливать винты с правым рабочим направлением, возле параметровмодели 90-60-90 винта, на одной из лопастей, ставят букву R.
Заметка:
Сделать отдельную калибровку каждого регулятора (!!! БЕЗ КОНВЕРТЕРА I2C В PWM !!!) — максимальный газ перед включением питания на регуль, после звука стик газа в минимум.
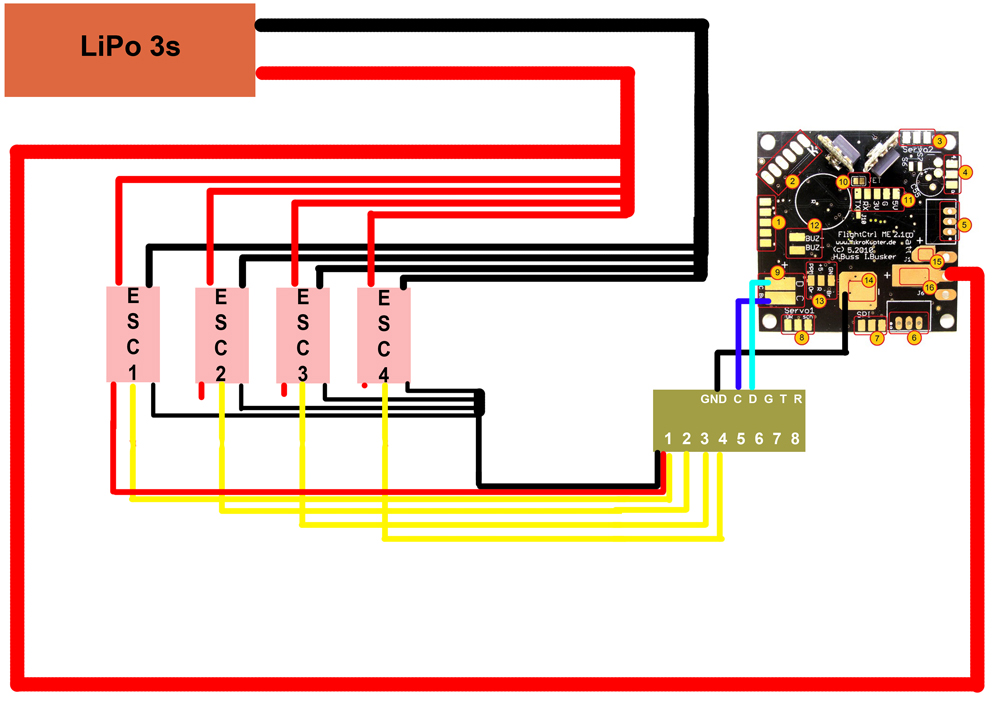
Схема подключения (извиняюсь, если кому схема показалась не профессиональной в плане выполнения/отрисовки) :D
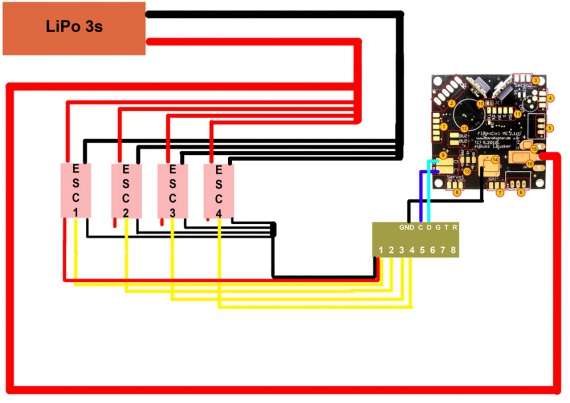
К (13) на плате полёта подпаиваем PPM приёмник.
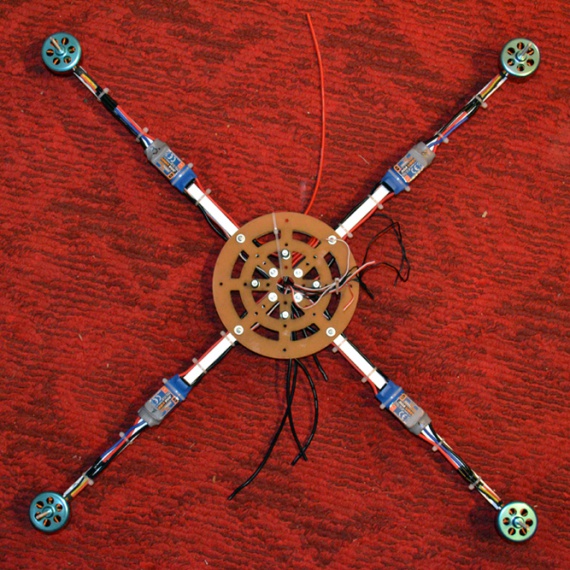
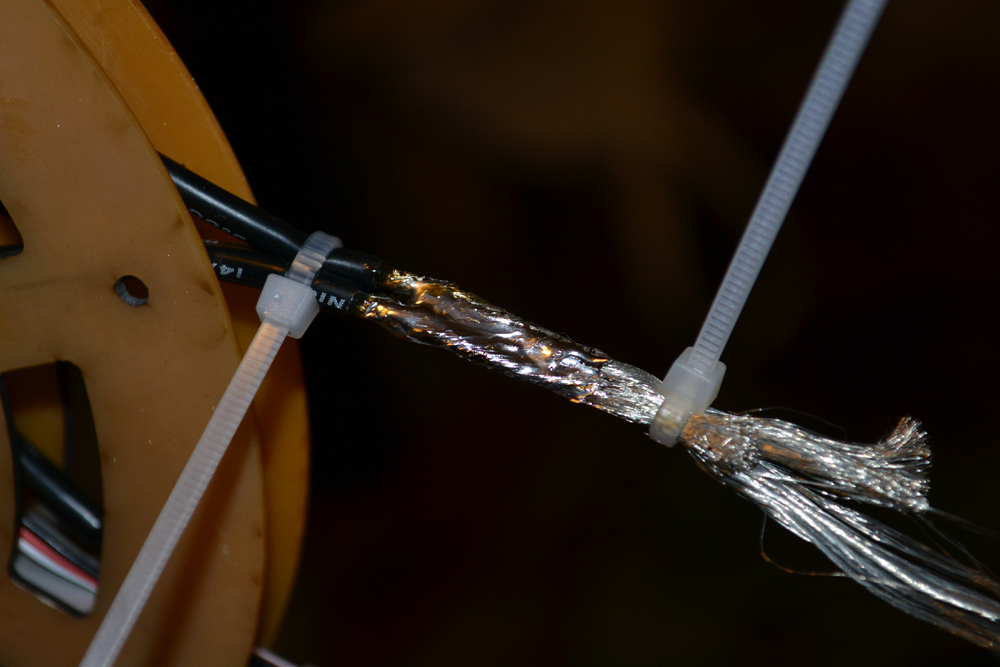
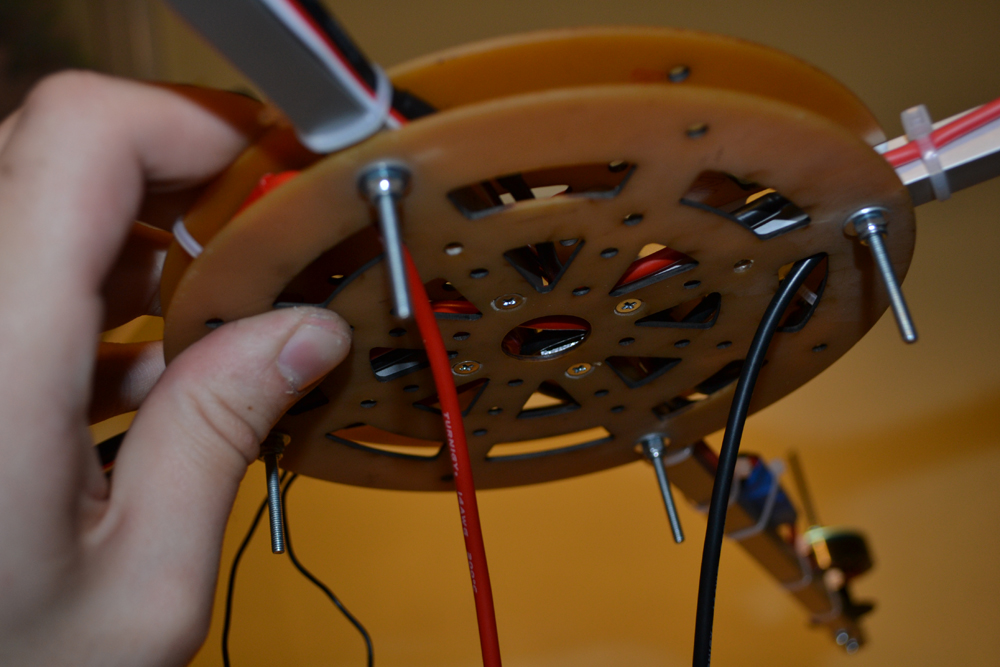
Задачей было вывести к "этажу" с аккумом только + и -. Пол вечера думал как сделать этого паука, решил таким способом.
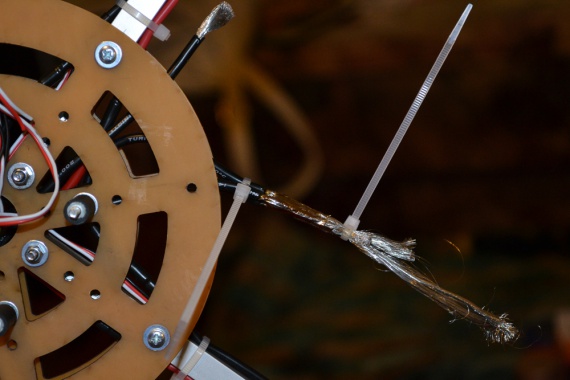
"Этаж" аккума будет достроен на болтах, что на последней фото видно.





Дальше:
Инструкция конвертера: www.abusemark.com/downloads/stm_manual_v2.pdf
Всё это видно в "схеме" :D подключения.
* подсоединяем только сигнальные провода к конвертеру: 1 рег — 1 пин, 2 рег — 2 пин и т.д.
* минусы, идущие от регов, соединяем в один пучок и подсоединяем к конвертеру на первый вход к лапке (-)
* плюсы, те самые от регов, тоже в один пучок и подсоединяем аналогично выше упомянутого минуса, только к лапке (+)
* пока не подсоединяем I2C (D,C,GND) коннектор к полётной плате, а делам общую калибровку движков через конвертер:
a) ставим перемычку между D и GND
б) подаём питание на все регули и конвертер (ВНИМАНИЕ!!! на моторах НЕ
должны быть установлены винты!!!)
в) индикатор (в инструкции под номером 9) мигает пока регуляторы будут
издавать звуки при калибровки.
г) как индикатор перестает мигать и будет гореть отключаем питание и
отсоединяем перемычку из шага (а)
* теперь можно соединить конвертер и полётный контролер
Вроде с установкой всё, в следующей и заключительной части подключим полётный контроллер к компу и сделаем некие настройки. Ну и видео первых полётов.
часть 1 — вступление
часть 2 — закупка комплектующих
часть 3 — прошиваем регуляторы
часть 4 — рама
часть 5 — устанавливаем электронику
Сегодня продолжу сборку своего чуда, как бы его назвать? Знаете дают клички машинам...
Приступим. Устанавливаем регуляторы, следим, что бы моторы вращались следующим образом — 1 и 2 моторы вращались по часовой, а 3 и 4 против.
1 3
X
4 2
На 1 и 2 надо устанавливать винты с правым рабочим направлением, возле параметров
Заметка:
Сделать отдельную калибровку каждого регулятора (!!! БЕЗ КОНВЕРТЕРА I2C В PWM !!!) — максимальный газ перед включением питания на регуль, после звука стик газа в минимум.
Схема подключения (извиняюсь, если кому схема показалась не профессиональной в плане выполнения/отрисовки) :D
К (13) на плате полёта подпаиваем PPM приёмник.
Задачей было вывести к "этажу" с аккумом только + и -. Пол вечера думал как сделать этого паука, решил таким способом.






Дальше:
Инструкция конвертера: www.abusemark.com/downloads/stm_manual_v2.pdf
Всё это видно в "схеме" :D подключения.
* подсоединяем только сигнальные провода к конвертеру: 1 рег — 1 пин, 2 рег — 2 пин и т.д.
* минусы, идущие от регов, соединяем в один пучок и подсоединяем к конвертеру на первый вход к лапке (-)
* плюсы, те самые от регов, тоже в один пучок и подсоединяем аналогично выше упомянутого минуса, только к лапке (+)
* пока не подсоединяем I2C (D,C,GND) коннектор к полётной плате, а делам общую калибровку движков через конвертер:
a) ставим перемычку между D и GND
б) подаём питание на все регули и конвертер (ВНИМАНИЕ!!! на моторах НЕ
должны быть установлены винты!!!)
в) индикатор (в инструкции под номером 9) мигает пока регуляторы будут
издавать звуки при калибровки.
г) как индикатор перестает мигать и будет гореть отключаем питание и
отсоединяем перемычку из шага (а)
* теперь можно соединить конвертер и полётный контролер
Вроде с установкой всё, в следующей и заключительной части подключим полётный контроллер к компу и сделаем некие настройки. Ну и видео первых полётов.
часть 1 — вступление
часть 2 — закупка комплектующих
часть 3 — прошиваем регуляторы
часть 4 — рама
часть 5 — устанавливаем электронику
PID-настройки коптера
Нередко слышу просьбы пояснить, что же такое эти PID-настройки, гейны, лимиты и т.п.
Как настраивать коптер, чтобы получить стабильный плавный полёт, или наоборот — для уже опытных пилотов — как полуить возможность делать акробатические трюки на коптерах?
Предлагаю вашему вниманию две статьи в MulticopterWiki:
Как настраивать коптер, чтобы получить стабильный плавный полёт, или наоборот — для уже опытных пилотов — как полуить возможность делать акробатические трюки на коптерах?
Предлагаю вашему вниманию две статьи в MulticopterWiki:
- Теория настройки ПИД и руководство по конфигурированию мультикоптеров — статья будет полезна для общего понимания принципов настройки мультикоптеров.
- Настройка контроллера KK2.0 LCD — тут есть конкретные практические шаги по настройке стабилизации популярной платки KK2.0, основанные на рекомендациях разработчика этого контроллера. Тем не менее, алгоритм и пояснения, рассмотренные в этой статье, также будут весьма полезны и применимы для многих других полётных контроллеров.