Первый quadcopter на базе от MK. (часть 5 — устанавливаем электронику)
Доброе!
Сегодня продолжу сборку своего чуда, как бы его назвать? Знаете дают клички машинам...
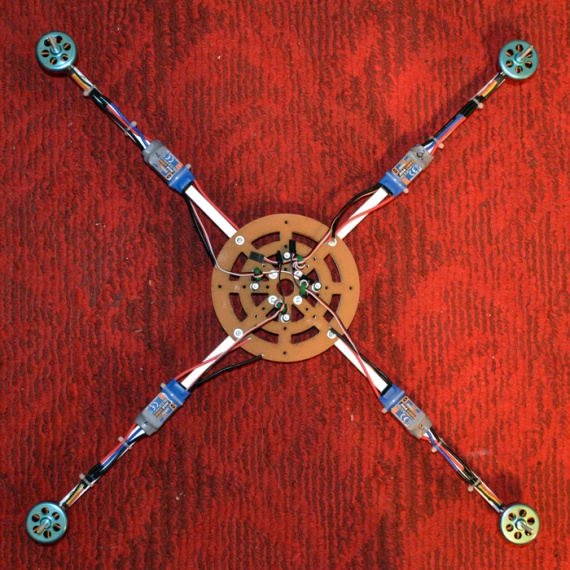
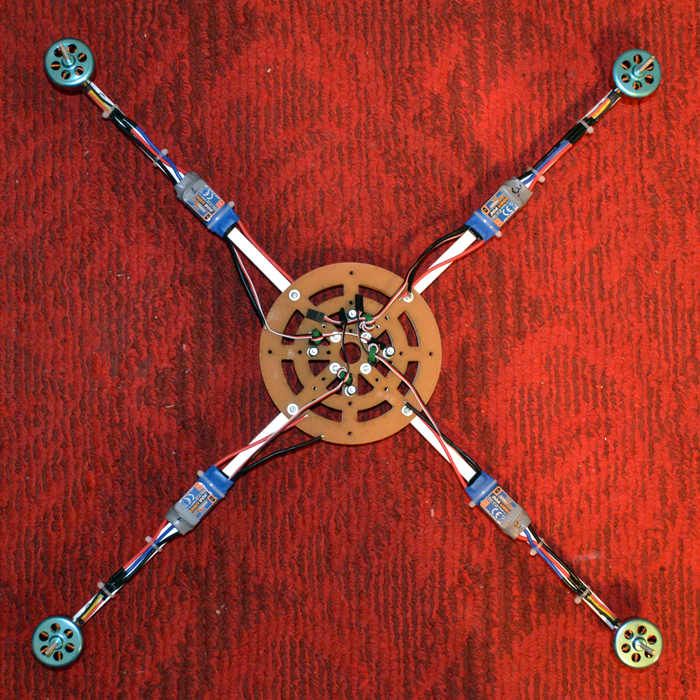
Приступим. Устанавливаем регуляторы, следим, что бы моторы вращались следующим образом — 1 и 2 моторы вращались по часовой, а 3 и 4 против.
1 3
X
4 2
На 1 и 2 надо устанавливать винты с правым рабочим направлением, возле параметровмодели 90-60-90 винта, на одной из лопастей, ставят букву R.
Заметка:
Сделать отдельную калибровку каждого регулятора (!!! БЕЗ КОНВЕРТЕРА I2C В PWM !!!) — максимальный газ перед включением питания на регуль, после звука стик газа в минимум.
Схема подключения (извиняюсь, если кому схема показалась не профессиональной в плане выполнения/отрисовки) :D
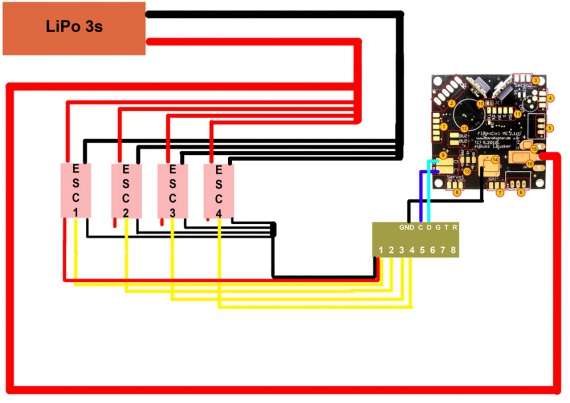
К (13) на плате полёта подпаиваем PPM приёмник.
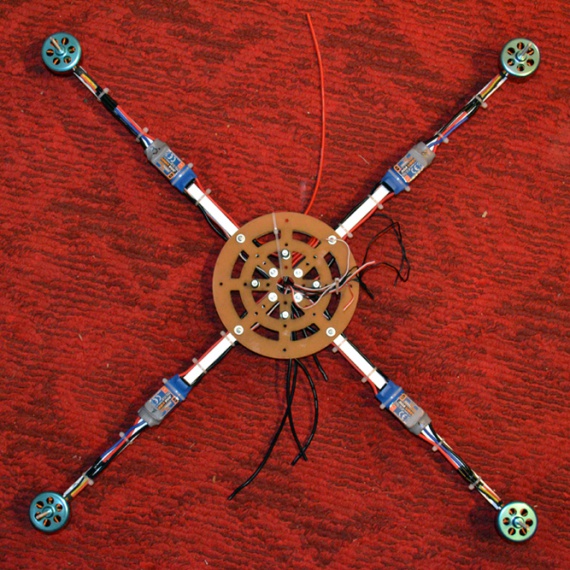
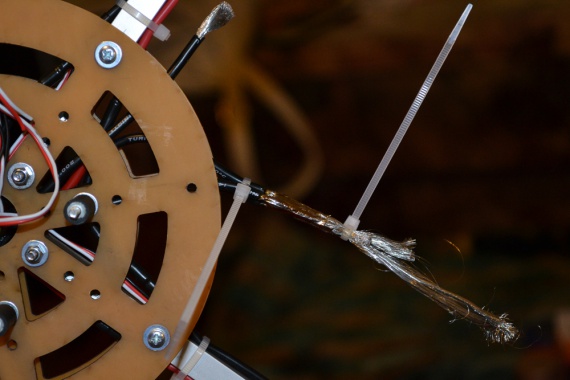
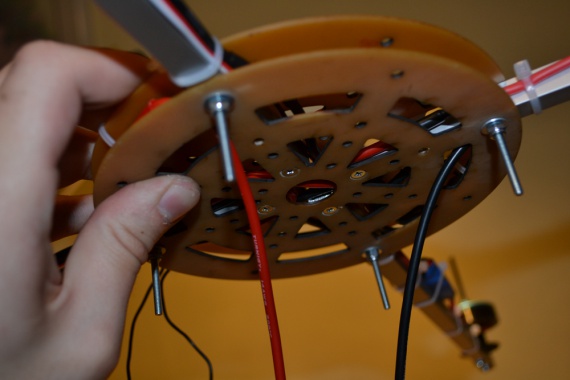
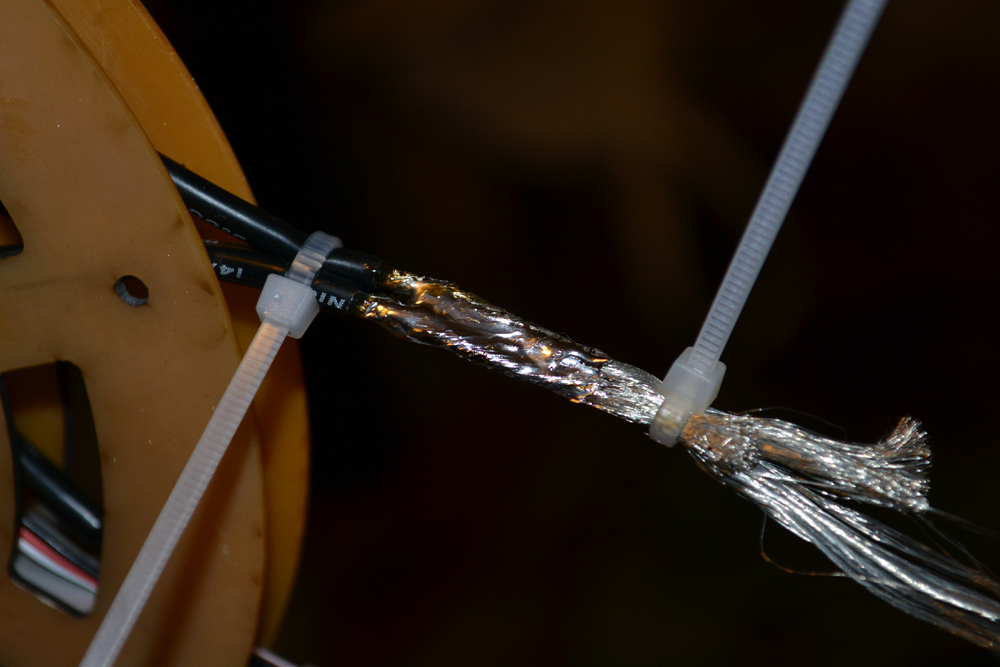
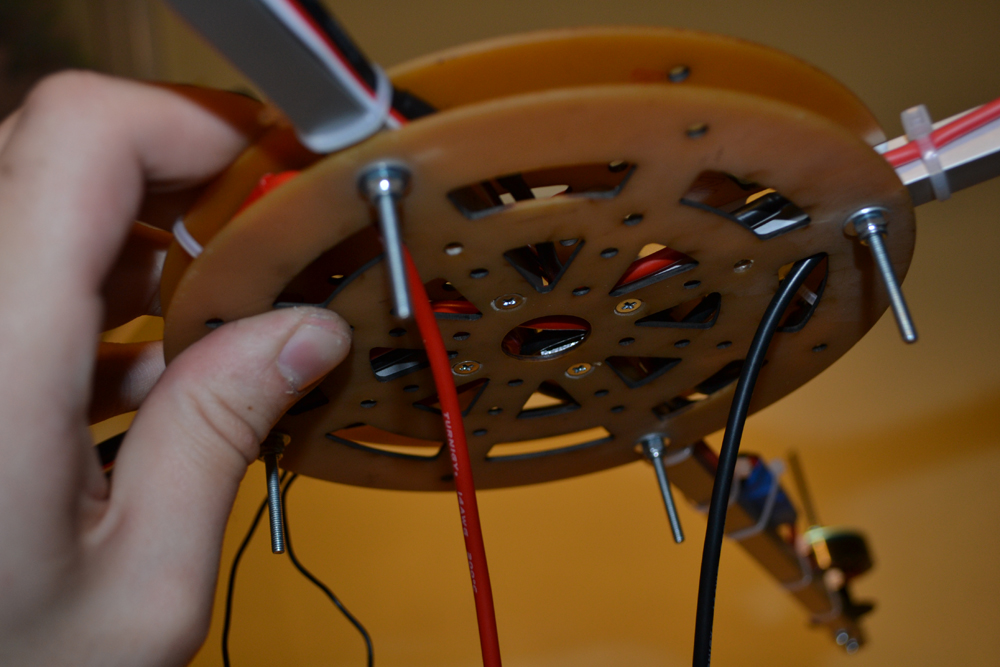
Задачей было вывести к "этажу" с аккумом только + и -. Пол вечера думал как сделать этого паука, решил таким способом.
"Этаж" аккума будет достроен на болтах, что на последней фото видно.





Дальше:
Инструкция конвертера: www.abusemark.com/downloads/stm_manual_v2.pdf
Всё это видно в "схеме" :D подключения.
* подсоединяем только сигнальные провода к конвертеру: 1 рег — 1 пин, 2 рег — 2 пин и т.д.
* минусы, идущие от регов, соединяем в один пучок и подсоединяем к конвертеру на первый вход к лапке (-)
* плюсы, те самые от регов, тоже в один пучок и подсоединяем аналогично выше упомянутого минуса, только к лапке (+)
* пока не подсоединяем I2C (D,C,GND) коннектор к полётной плате, а делам общую калибровку движков через конвертер:
a) ставим перемычку между D и GND
б) подаём питание на все регули и конвертер (ВНИМАНИЕ!!! на моторах НЕ
должны быть установлены винты!!!)
в) индикатор (в инструкции под номером 9) мигает пока регуляторы будут
издавать звуки при калибровки.
г) как индикатор перестает мигать и будет гореть отключаем питание и
отсоединяем перемычку из шага (а)
* теперь можно соединить конвертер и полётный контролер
Вроде с установкой всё, в следующей и заключительной части подключим полётный контроллер к компу и сделаем некие настройки. Ну и видео первых полётов.
часть 1 — вступление
часть 2 — закупка комплектующих
часть 3 — прошиваем регуляторы
часть 4 — рама
часть 5 — устанавливаем электронику
Сегодня продолжу сборку своего чуда, как бы его назвать? Знаете дают клички машинам...
Приступим. Устанавливаем регуляторы, следим, что бы моторы вращались следующим образом — 1 и 2 моторы вращались по часовой, а 3 и 4 против.
1 3
X
4 2
На 1 и 2 надо устанавливать винты с правым рабочим направлением, возле параметров
Заметка:
Сделать отдельную калибровку каждого регулятора (!!! БЕЗ КОНВЕРТЕРА I2C В PWM !!!) — максимальный газ перед включением питания на регуль, после звука стик газа в минимум.
Схема подключения (извиняюсь, если кому схема показалась не профессиональной в плане выполнения/отрисовки) :D
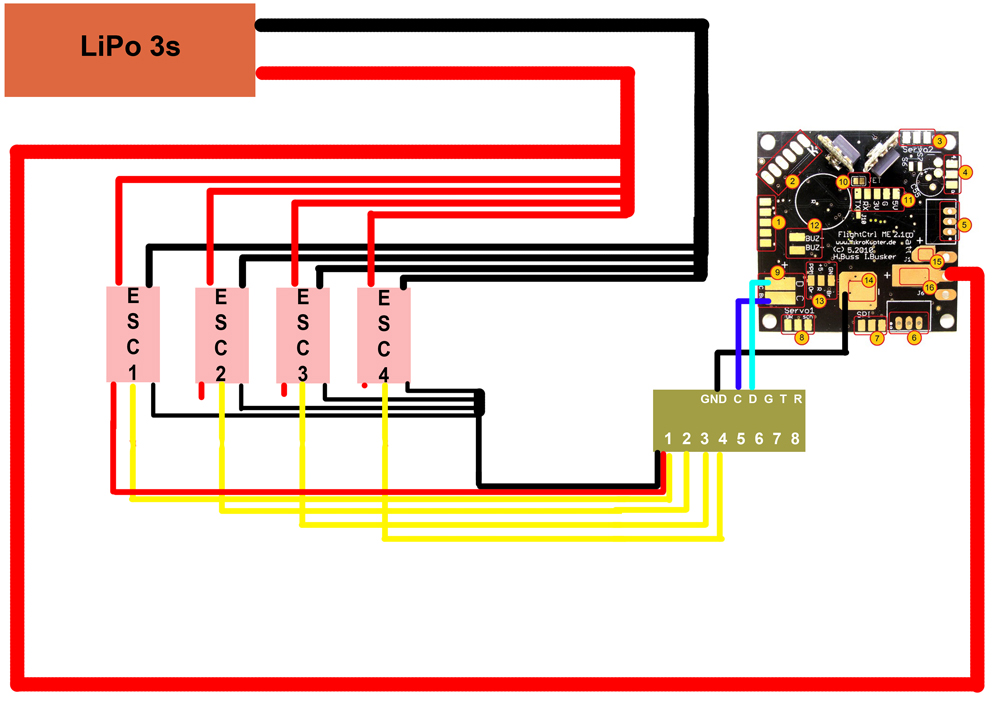
К (13) на плате полёта подпаиваем PPM приёмник.
Задачей было вывести к "этажу" с аккумом только + и -. Пол вечера думал как сделать этого паука, решил таким способом.






Дальше:
Инструкция конвертера: www.abusemark.com/downloads/stm_manual_v2.pdf
Всё это видно в "схеме" :D подключения.
* подсоединяем только сигнальные провода к конвертеру: 1 рег — 1 пин, 2 рег — 2 пин и т.д.
* минусы, идущие от регов, соединяем в один пучок и подсоединяем к конвертеру на первый вход к лапке (-)
* плюсы, те самые от регов, тоже в один пучок и подсоединяем аналогично выше упомянутого минуса, только к лапке (+)
* пока не подсоединяем I2C (D,C,GND) коннектор к полётной плате, а делам общую калибровку движков через конвертер:
a) ставим перемычку между D и GND
б) подаём питание на все регули и конвертер (ВНИМАНИЕ!!! на моторах НЕ
должны быть установлены винты!!!)
в) индикатор (в инструкции под номером 9) мигает пока регуляторы будут
издавать звуки при калибровки.
г) как индикатор перестает мигать и будет гореть отключаем питание и
отсоединяем перемычку из шага (а)
* теперь можно соединить конвертер и полётный контролер
Вроде с установкой всё, в следующей и заключительной части подключим полётный контроллер к компу и сделаем некие настройки. Ну и видео первых полётов.
часть 1 — вступление
часть 2 — закупка комплектующих
часть 3 — прошиваем регуляторы
часть 4 — рама
часть 5 — устанавливаем электронику